近日,陜西廣播電視臺《陜西新聞聯(lián)播》【回眸“十三五” 展望“十四五”】播發(fā)了由我校機械工程學(xué)院馬宏偉教授領(lǐng)銜研發(fā)的世界首套“煤礦巷道掘進機器人系統(tǒng)”成果,該成果已在榆北煤業(yè)小保當(dāng)煤礦投入使用。
長期以來,煤礦巷道掘進存在地質(zhì)條件復(fù)雜、工藝裝備落后,作業(yè)人員偏多,操作環(huán)境惡劣,安全風(fēng)險嚴峻,采快掘慢失衡等問題,嚴重制約著煤炭“安全、高效、綠色、智能”開采。多年來,馬宏偉教授團隊致力于煤礦采掘裝備智能化研發(fā),是我國最早提出煤礦機器人的團隊之一。近年來緊密結(jié)合煤礦重大需求,主攻煤礦掘進機器人關(guān)鍵技術(shù),提出集截割機器人、臨時支護機器人、鉆錨機器人、錨網(wǎng)運輸機器人等于一體的智能掘進機器人系統(tǒng)。
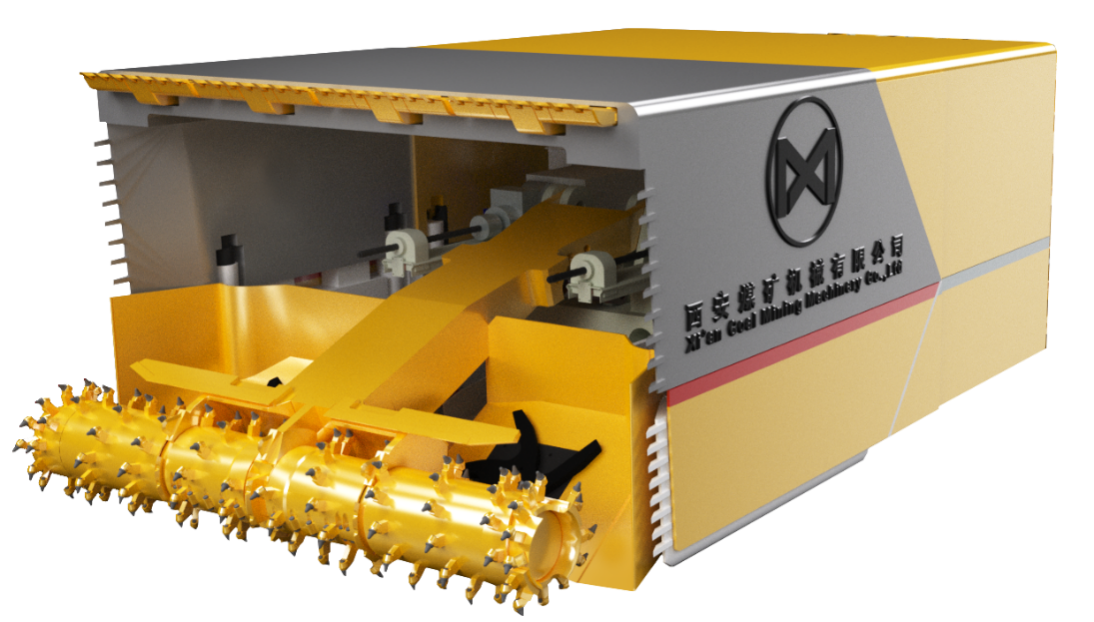
2019年初針對小保當(dāng)煤礦巷道夾矸與片幫共存,現(xiàn)有裝備掘進效果不佳等難題,團隊知難而進,毅然承擔(dān)了陜煤集團“智能掘進技術(shù)及成套裝備研發(fā)與示范”重大項目,聯(lián)合西煤機等多家單位協(xié)同攻關(guān),尤其是在新冠疫情期間,團隊不懼風(fēng)險,最早復(fù)研,團結(jié)協(xié)作,克艱攻難。項目從2019年2月啟動,經(jīng)過多方聯(lián)合攻關(guān),協(xié)同創(chuàng)新,成功研制了世界首套煤礦智能掘進機器人系統(tǒng),于2020年6月24日順利出廠,2020年8月11日完成地面調(diào)試,2020年9月8日正式投入使用。該系統(tǒng)可實現(xiàn)自主截割、自主定位定向、自主行駛、自主布網(wǎng)、人機協(xié)同鉆錨、多機器人協(xié)同并行作業(yè)、虛擬現(xiàn)實遠程測控。
該系統(tǒng)的成功研發(fā),破解了復(fù)雜地質(zhì)條件煤礦巷道快速智能掘進技術(shù)難題,創(chuàng)造了日掘進50米的記錄,被譽為“掘進利劍”,在中國煤炭工業(yè)協(xié)會首次“全國煤礦快速掘進現(xiàn)場交流會”上得到盛贊。



 學(xué)校首頁
學(xué)校首頁

 西科機械e家
西科機械e家
 友情鏈接
友情鏈接