“高端機(jī)電裝備系統(tǒng)設(shè)計(jì)”科研成果轉(zhuǎn)化本科教學(xué)案例
——《機(jī)電一體化系統(tǒng)設(shè)計(jì)》
完 成 人:樊紅衛(wèi)(課程組長(zhǎng)),張旭輝(專業(yè)負(fù)責(zé)人),王川偉,魯麒(課程副組長(zhǎng)),史曉娟,楊文娟,薛旭升,杜昱陽(yáng),董明,姜俊英,萬(wàn)翔
完成單位:西安科技大學(xué)機(jī)械工程學(xué)院儀器科學(xué)與技術(shù)系、機(jī)械電子工程系
服務(wù)課程:《機(jī)電一體化系統(tǒng)設(shè)計(jì)》——機(jī)械電子工程國(guó)家一流本科專業(yè)核心課程,入選國(guó)家級(jí)一流課程
案例內(nèi)容:圍繞數(shù)控機(jī)床、煤礦裝備、機(jī)器人3類典型的機(jī)電一體化系統(tǒng)給出課程組科研轉(zhuǎn)化教學(xué)案例
使用說(shuō)明:本案例旨在為《機(jī)電一體化系統(tǒng)設(shè)計(jì)》課程的教學(xué)經(jīng)驗(yàn)交流和學(xué)生學(xué)習(xí)本門課程提供參考
使用權(quán)限:未經(jīng)本課程組書(shū)面同意,不得轉(zhuǎn)載,不以任何目的私自使用本網(wǎng)頁(yè)文本和圖片,違者必究
案例1:高速精密機(jī)床電主軸智能動(dòng)平衡系統(tǒng)
摘要:針對(duì)高速精密機(jī)床電主軸不平衡問(wèn)題,設(shè)計(jì)開(kāi)發(fā)了一套主軸轉(zhuǎn)子智能動(dòng)平衡系統(tǒng)。該系統(tǒng)包括:1)主動(dòng)平衡作動(dòng)器,2)主動(dòng)平衡控制器,3)信號(hào)采集系統(tǒng)。系統(tǒng)工作時(shí),首先由信號(hào)采集系統(tǒng)獲取主軸的振動(dòng)、轉(zhuǎn)速等信息,對(duì)其進(jìn)行時(shí)域、頻域等分析獲得不平衡特征,然后將有效信息輸送至控制器,由控制器按照基于影響系數(shù)的自適應(yīng)控制算法進(jìn)行決策,并發(fā)送指令給平衡作動(dòng)器,最后由作動(dòng)器施行配重塊的極坐標(biāo)運(yùn)動(dòng),形成不平衡補(bǔ)償矢量,實(shí)現(xiàn)對(duì)主軸運(yùn)行過(guò)程中轉(zhuǎn)子質(zhì)量不平衡問(wèn)題的在線主動(dòng)抑制。
關(guān)鍵詞:機(jī)床主軸;主軸不平衡;在線主動(dòng)平衡
一、科研項(xiàng)目基本信息介紹
樊紅衛(wèi),張旭輝,肖玲,程文杰,吳中華,董潤(rùn)霖,劉永偉. 高品質(zhì)自適應(yīng)電磁平衡機(jī)理及自平衡電主軸動(dòng)態(tài)特性研究,國(guó)家自然科學(xué)基金青年項(xiàng)目,51605380,2017-01至2019-12,24萬(wàn)元,已結(jié)題.
二、科研促進(jìn)教學(xué)案例
1.案例主要內(nèi)容
“高速精密機(jī)床電主軸智能動(dòng)平衡系統(tǒng)”如圖1所示,采用壓電式加速度傳感器和電渦流位移傳感器檢測(cè)主軸振動(dòng),采用光電反射式傳感器測(cè)量主軸轉(zhuǎn)速和相位,采用DSP+FPGA開(kāi)發(fā)控制器,平衡作動(dòng)器采用電磁-永磁混合驅(qū)動(dòng)方式、配重塊進(jìn)行等半徑極坐標(biāo)運(yùn)動(dòng),雙盤合成等效平衡矢量,基于單平面影響系數(shù)自適應(yīng)方法進(jìn)行控制決策。圖1所示為系統(tǒng)在高速磨削電主軸上的應(yīng)用示例。

圖1 高速精密機(jī)床電主軸智能動(dòng)平衡系統(tǒng)
本案例已開(kāi)發(fā)相關(guān)實(shí)驗(yàn)平臺(tái)2套,發(fā)表論文40余篇,申請(qǐng)專利6項(xiàng),登記軟著2件,可用于《機(jī)電一體化系統(tǒng)設(shè)計(jì)》《數(shù)控技術(shù)》《機(jī)械工程測(cè)試技術(shù)》《機(jī)械控制工程基礎(chǔ)》等課程的案例教學(xué)。
2.案例實(shí)際應(yīng)用效果簡(jiǎn)介
(1)本案例長(zhǎng)期用于機(jī)械類各專業(yè)本科生《機(jī)電一體化系統(tǒng)設(shè)計(jì)》等多門課程的理論教學(xué),具有技術(shù)前沿性、綜合性和實(shí)用性特點(diǎn),能夠支撐學(xué)生創(chuàng)新能力和知識(shí)綜合應(yīng)用能力的培養(yǎng),啟發(fā)學(xué)生認(rèn)識(shí)并探索解決復(fù)雜機(jī)電工程問(wèn)題。
(2)本案例相關(guān)內(nèi)容已在張旭輝、樊紅衛(wèi)等主編《機(jī)電一體化系統(tǒng)設(shè)計(jì)》規(guī)劃教材中引用,主要服務(wù)于該教材“第7章 機(jī)電一體化典型系統(tǒng)設(shè)計(jì)——7.2 數(shù)控機(jī)床系統(tǒng)設(shè)計(jì)”章節(jié)的講授,體現(xiàn)了教學(xué)內(nèi)容的新穎性和高階性。
3.支撐材料
(1)“高品質(zhì)自適應(yīng)電磁平衡機(jī)理及自平衡電主軸動(dòng)態(tài)特性研究”國(guó)家自然科學(xué)基金申報(bào)書(shū)、結(jié)題報(bào)告;
(2)自適應(yīng)電磁平衡系統(tǒng)研制報(bào)告,含視頻、圖片等;
(3)已發(fā)表的主要參考論文
[1]樊紅衛(wèi),邵偲潔,楊一晴,萬(wàn)翔,張旭輝,馬宏偉.一種機(jī)械式自平衡電主軸系統(tǒng)及試驗(yàn)研究[J].制造技術(shù)與機(jī)床,2019(03):50-54.DOI:10.19287/j.cnki.1005-2402.2019.03.012.
[2]樊紅衛(wèi),景敏卿,智靜娟,辛文輝,李猛,劉恒.轉(zhuǎn)子在線動(dòng)平衡嵌入式控制系統(tǒng)開(kāi)發(fā)與驗(yàn)證[J].振動(dòng).測(cè)試與診斷,2015,35(04):746-751+802.DOI:10.16450/j.cnki.issn.1004-6801.2015.04.024.
[3]樊紅衛(wèi),景敏卿,王仁超,劉恒.磁力配重型在線自動(dòng)平衡頭的作動(dòng)原理研究[J].西安交通大學(xué)學(xué)報(bào),2013,47(02):97-102.
4.案例思考題
(1)轉(zhuǎn)子在線主動(dòng)平衡執(zhí)行器有哪些類型?它們的工作原理分別是什么?
(2)轉(zhuǎn)子在線主動(dòng)平衡控制器的架構(gòu)還可以如何設(shè)計(jì)?相關(guān)動(dòng)平衡控制算法有哪些?
(3)請(qǐng)你繪制轉(zhuǎn)子在線主動(dòng)平衡系統(tǒng)框圖。
5.案例使用說(shuō)明
適用范圍:機(jī)械類專業(yè)本科三/四年級(jí)
配套教材:張旭輝,樊紅衛(wèi)等. 機(jī)電一體化系統(tǒng)設(shè)計(jì)[M]. 武漢:華中科技大學(xué)出版社,2020.
教學(xué)目的:掌握“高速精密機(jī)床電主軸智能動(dòng)平衡系統(tǒng)”檢測(cè)單元、控制單元、機(jī)械單元的設(shè)計(jì)思路和方法。
教學(xué)建議:建議采用翻轉(zhuǎn)課堂教學(xué)法,學(xué)生通過(guò)查閱文獻(xiàn)自主完成設(shè)計(jì),課堂上教師給予針對(duì)性的指導(dǎo)。
6.案例聯(lián)系人
樊紅衛(wèi) hw_fan@xust.edu.cn,15829711143
案例2:數(shù)控機(jī)床開(kāi)放式數(shù)控系統(tǒng)
摘要:運(yùn)動(dòng)控制系統(tǒng)是開(kāi)放式數(shù)控系統(tǒng)的核心組成部分,負(fù)責(zé)控制數(shù)控機(jī)床每個(gè)軸的準(zhǔn)確定位。針對(duì)數(shù)控機(jī)床高速、高精度的應(yīng)用需求,完成了高性能運(yùn)動(dòng)控制系統(tǒng)的研發(fā)。為解決數(shù)控機(jī)床運(yùn)動(dòng)控制中出現(xiàn)的強(qiáng)耦合、非線性和易受干擾等問(wèn)題,建立了數(shù)控機(jī)床運(yùn)動(dòng)控制系統(tǒng)的數(shù)學(xué)模型,對(duì)其位置控制算法進(jìn)行深入研究,改善運(yùn)動(dòng)控制系統(tǒng)的穩(wěn)態(tài)精度與動(dòng)態(tài)響應(yīng)性能,從而提高數(shù)控機(jī)床的單軸定位精度和輪廓加工精度。
關(guān)鍵詞:數(shù)控系統(tǒng);運(yùn)動(dòng)控制,控制算法
一、科研項(xiàng)目基本信息介紹
史曉娟,李建華,王淵,王高洋,齊彪,張修德. 數(shù)控機(jī)床高性能運(yùn)動(dòng)控制系統(tǒng)的研發(fā),西安市科技局科技創(chuàng)新引導(dǎo)項(xiàng)目,201805036YD14CG20(2),2018-06至2020-06,6萬(wàn)元,已結(jié)題.
二、科研促進(jìn)教學(xué)案例
1.案例主要內(nèi)容
“數(shù)控機(jī)床高性能運(yùn)動(dòng)控制系統(tǒng)”如圖1所示。采用基數(shù)字信號(hào)處理器(DSP)、現(xiàn)場(chǎng)可編程門陣列(FPGA)及微機(jī)PCI總線完成了高性能運(yùn)動(dòng)控制系統(tǒng)的硬件設(shè)計(jì)和軟件設(shè)計(jì),可以提高運(yùn)動(dòng)控制系統(tǒng)的實(shí)時(shí)性以及運(yùn)算速度。采用電子學(xué)細(xì)分法基于FPGA器件對(duì)運(yùn)動(dòng)控制系統(tǒng)的位置檢測(cè)電路進(jìn)行優(yōu)化設(shè)計(jì),可以極大地提高編碼器位置信息的分辨力、精度和抗干擾性,充分保障了位置反饋的精度和可靠性。研究高性能的位置閉環(huán)控制算法,提高運(yùn)動(dòng)控制系統(tǒng)的抗干擾能力及對(duì)系統(tǒng)參數(shù)變化的適應(yīng)性,提高各進(jìn)給軸的定位精度。圖1所示為運(yùn)動(dòng)控制系統(tǒng)在三維數(shù)控銑床模型上的應(yīng)用。

圖1 三維數(shù)控銑床仿真加工模型
本案例已開(kāi)發(fā)相關(guān)實(shí)驗(yàn)平臺(tái)1套,發(fā)表論文10余篇,申請(qǐng)國(guó)家發(fā)明專利1項(xiàng),國(guó)家實(shí)用新型專利1項(xiàng),可用于《機(jī)電一體化系統(tǒng)設(shè)計(jì)》《數(shù)控技術(shù)》《機(jī)械工程測(cè)試技術(shù)》《機(jī)械控制工程基礎(chǔ)》等課程的案例教學(xué)。
2.案例實(shí)際應(yīng)用效果簡(jiǎn)介
(1)本案例長(zhǎng)期用于機(jī)械類各專業(yè)本科生《機(jī)電一體化系統(tǒng)設(shè)計(jì)》《數(shù)控技術(shù)》等多門課程的理論教學(xué),具有技術(shù)前沿性、綜合性和實(shí)用性特點(diǎn),能夠支撐學(xué)生創(chuàng)新能力和知識(shí)綜合應(yīng)用能力的培養(yǎng),啟發(fā)學(xué)生認(rèn)識(shí)并探索解決復(fù)雜機(jī)電工程問(wèn)題。
(2)本案例相關(guān)內(nèi)容已在張旭輝、樊紅衛(wèi)等主編《機(jī)電一體化系統(tǒng)設(shè)計(jì)》規(guī)劃教材中體現(xiàn),主要服務(wù)于該教材“第7章 機(jī)電一體化典型系統(tǒng)設(shè)計(jì)——7.2 數(shù)控機(jī)床系統(tǒng)設(shè)計(jì)”章節(jié)的講授,體現(xiàn)了教學(xué)內(nèi)容的新穎性和高階性。
3.支撐材料
(1)“數(shù)控機(jī)床高性能運(yùn)動(dòng)控制系統(tǒng)的研發(fā)”西安市科技局科技創(chuàng)新引導(dǎo)項(xiàng)目申報(bào)書(shū)、結(jié)題報(bào)告;
(2)運(yùn)動(dòng)控制系統(tǒng)技術(shù)報(bào)告;
(3)已發(fā)表的主要參考論文
[1]X J Shi. D D Chen. Design and Implementation of Position Detection System Based on 3-UPU Parallel Mechanism[C]. IEEE 2nd International Conference on Micro/Nano Sensors for AI, Healthcare, and Robotics. Shenzhen, China, Oct. 2019.
[2]史曉娟,楊紫艷.基于模糊滑模控制的數(shù)控機(jī)床位置伺服系統(tǒng)[J]. 制造技術(shù)與機(jī)床,2017,(3):64-68.
4.案例思考題
(1)數(shù)控機(jī)床各進(jìn)給軸的執(zhí)行部件有哪些類型?它們的工作原理分別是什么?
(2)如何提供數(shù)控機(jī)床的位置檢測(cè)精度?
(3)什么是開(kāi)環(huán)、半閉環(huán)和閉環(huán)位置伺服系統(tǒng)?如何提高運(yùn)動(dòng)控制系統(tǒng)的控制精度?
5.案例使用說(shuō)明
適用范圍:機(jī)械類專業(yè)本科三/四年級(jí)
配套教材:張旭輝,樊紅衛(wèi)等. 機(jī)電一體化系統(tǒng)設(shè)計(jì)[M]. 武漢:華中科技大學(xué)出版社,2020.
教學(xué)目的:掌握“數(shù)控機(jī)床高性能運(yùn)動(dòng)控制系統(tǒng)”檢測(cè)單元、控制單元、機(jī)械單元的設(shè)計(jì)思路和方法。
教學(xué)建議:建議采用翻轉(zhuǎn)課堂教學(xué)法,學(xué)生通過(guò)查閱文獻(xiàn)自主完成設(shè)計(jì),課堂上教師給予針對(duì)性的指導(dǎo)。
6.案例聯(lián)系人
史曉娟 shixj@xust.edu.cn,13891966085
案例3:綠色化數(shù)控機(jī)床系統(tǒng)
摘要:針對(duì)高端數(shù)控機(jī)床運(yùn)行過(guò)程高投入、高能耗、高污染、低效益等問(wèn)題,設(shè)計(jì)開(kāi)發(fā)了一套數(shù)控珩磨裝備的碳排放量化分析與關(guān)鍵零部件低碳結(jié)構(gòu)設(shè)計(jì)系統(tǒng)。該系統(tǒng)包括:1)碳排放建模與評(píng)估功能模塊,2)關(guān)鍵零部件決策功能模塊,3)低碳結(jié)構(gòu)設(shè)計(jì)功能模塊。系統(tǒng)工作時(shí),首先針對(duì)待設(shè)計(jì)的零部件設(shè)置碳排放相關(guān)參數(shù),量化機(jī)床原材料獲取階段、制造加工階段和使用階段的碳排放;然后對(duì)溫度場(chǎng)進(jìn)行仿真建模,建立碳排放場(chǎng),獲得關(guān)鍵零部件決策結(jié)果;最后設(shè)置拓?fù)鋬?yōu)化及算法相關(guān)參數(shù),調(diào)用雙層嵌套的博弈求解方法優(yōu)化關(guān)鍵零部件剛度和碳排放,并對(duì)結(jié)果進(jìn)行輸出,從而指導(dǎo)設(shè)計(jì)人員對(duì)數(shù)控珩磨裝備高碳排放關(guān)鍵部件進(jìn)行改進(jìn)和優(yōu)化。
關(guān)鍵詞:珩磨機(jī)床;綠色設(shè)計(jì);結(jié)構(gòu)優(yōu)化;碳排放
一、科研項(xiàng)目基本信息介紹
[1]魯麒. 碳排放-靜動(dòng)態(tài)特性耦合的磨削機(jī)床關(guān)鍵部件辨識(shí)及結(jié)構(gòu)優(yōu)化,國(guó)家自然科學(xué)基金青年項(xiàng)目,52005400,2021-01至2023-12,24萬(wàn)元,在研.
[2]魯麒. 基于低碳多屬性關(guān)聯(lián)的珩磨機(jī)床關(guān)鍵部件結(jié)構(gòu)優(yōu)化設(shè)計(jì),博士后“地區(qū)專項(xiàng)支持計(jì)劃”,2021M693881,2022-01至2023-12,8萬(wàn)元,在研.
二、科研促進(jìn)教學(xué)案例
1.案例主要內(nèi)容
數(shù)控珩磨裝備的“碳排放量化分析與關(guān)鍵零部件低碳結(jié)構(gòu)設(shè)計(jì)系統(tǒng)”如圖1所示。

圖1 碳排放量化分析與關(guān)鍵零部件低碳結(jié)構(gòu)設(shè)計(jì)系統(tǒng)
本案例已開(kāi)發(fā)相關(guān)實(shí)驗(yàn)平臺(tái)1套,發(fā)表論文8余篇,申請(qǐng)專利2項(xiàng),可用于《機(jī)電一體化系統(tǒng)設(shè)計(jì)》《數(shù)控技術(shù)》《機(jī)械設(shè)計(jì)》《現(xiàn)代設(shè)計(jì)法》《機(jī)械制造裝備》等課程案例教學(xué)。
2.案例實(shí)際應(yīng)用效果簡(jiǎn)介
本案例可用于機(jī)械類各專業(yè)本科生《機(jī)電一體化系統(tǒng)設(shè)計(jì)》等多門課程的理論與實(shí)踐教學(xué)。高檔數(shù)控裝備是典型的機(jī)電一體化產(chǎn)品,其綠色化發(fā)展是實(shí)現(xiàn)我國(guó)2030年“碳達(dá)峰”與2060年“碳中和”目標(biāo)的有效途徑。數(shù)控機(jī)床的綠色、低碳發(fā)展也是《機(jī)電一體化系統(tǒng)設(shè)計(jì)》等課程中的重要教學(xué)內(nèi)容,本案例能夠?qū)⒅圃鞆?qiáng)國(guó)等課程思政理念融入到學(xué)科專業(yè)教學(xué)中,形成全方位協(xié)同育人效應(yīng)。同時(shí),案例的技術(shù)前沿性、綜合性等特點(diǎn),能夠引導(dǎo)學(xué)生學(xué)習(xí)知識(shí),培養(yǎng)發(fā)現(xiàn)問(wèn)題、解決問(wèn)題的能力。
3.支撐材料
(1)“碳排放-靜動(dòng)態(tài)特性耦合的磨削機(jī)床關(guān)鍵部件辨識(shí)及結(jié)構(gòu)優(yōu)化”國(guó)家自然科學(xué)基金申報(bào)書(shū)、“基于低碳多屬性關(guān)聯(lián)的珩磨機(jī)床關(guān)鍵部件結(jié)構(gòu)優(yōu)化設(shè)計(jì)”博士后科學(xué)基金申報(bào)書(shū);
(2)已發(fā)表的主要參考論文
[1]Lu, Q., Zhou, G. H., Zhao, F., Ren, Y., Li, L., Luan, X., & Sutherland, J. W. (2019). Topology optimization of oilstone components considering carbon emissions associated with honing processes. Journal of Cleaner Production, 225, 181-195.
[2]Lu, Q., Zhou, G.H., Zhao, F., Li, L., & Ren, Y.P. (2018). Determination of Shape and Distribution of Abrasive Grains to Reduce Carbon Emissions of Honing Process. Journal of manufacturing science and engineering-transactions of the ASME, 141(2).
[3]Lu, Q., Zhou, G. H., Xiao, Z. D., Chang, F. T., & Tian, C. L. (2018). A selection methodology of key parts based on the characteristic of carbon emissions for low-carbon design. International Journal of Advanced Manufacturing Technology, 94(9-12), 3359-3373.
4.案例思考題
(1)機(jī)床的全生命周期階段有哪些,各階段的主要任務(wù)是什么?
(2)機(jī)床加工過(guò)程的功率模型實(shí)驗(yàn)平臺(tái)如何設(shè)計(jì)?采用哪些傳感器?
(3)輕量化設(shè)計(jì)方法有哪些?請(qǐng)你用Ansysworkbench對(duì)扳手結(jié)構(gòu)進(jìn)行拓?fù)鋬?yōu)化設(shè)計(jì)。
5.案例使用說(shuō)明
適用范圍:機(jī)械類專業(yè)本科三/四年級(jí)
配套教材:張旭輝,樊紅衛(wèi)等. 機(jī)電一體化系統(tǒng)設(shè)計(jì)[M]. 武漢:華中科技大學(xué)出版社,2020.
教學(xué)目的:掌握“碳排放量化分析與關(guān)鍵零部件低碳結(jié)構(gòu)設(shè)計(jì)系統(tǒng)”檢測(cè)單元、控制單元、機(jī)械單元的設(shè)計(jì)思路和方法。
教學(xué)建議:建議采用翻轉(zhuǎn)課堂教學(xué)法,學(xué)生通過(guò)查閱文獻(xiàn)自主完成設(shè)計(jì),課堂上教師給予針對(duì)性的指導(dǎo)。
6.案例聯(lián)系人
魯麒 luqi@xust.edu.cn,15109263212
案例4:智能移動(dòng)機(jī)器人系統(tǒng)
摘要:伴隨工業(yè)4.0在全球掀起新一輪工業(yè)革命,我國(guó)大力推行“中國(guó)制造2025”戰(zhàn)略,機(jī)器人迎來(lái)前所未有的機(jī)遇。目前,地面機(jī)器人相關(guān)技術(shù)已很發(fā)達(dá),其越障避障能力要求非常高。為適應(yīng)更復(fù)雜的地形環(huán)境,研發(fā)了四擺臂六履帶智能移動(dòng)機(jī)器人系統(tǒng),其主要由機(jī)械系統(tǒng)、測(cè)控系統(tǒng)等組成。結(jié)合傳感檢測(cè)、信息融合、遠(yuǎn)程通信等關(guān)鍵技術(shù),采用分布式、模塊化思想搭建智能移動(dòng)機(jī)器人測(cè)控系統(tǒng)。該機(jī)器人具備較強(qiáng)的越障避障功能,配備相應(yīng)的傳感檢測(cè)裝置,可在災(zāi)害發(fā)生后代替救援人員進(jìn)入救援現(xiàn)場(chǎng),或替代工作人員從事日常巡檢工作。
關(guān)鍵詞:移動(dòng)機(jī)器人;機(jī)械系統(tǒng);測(cè)控系統(tǒng);越障避障
一、科研項(xiàng)目基本信息介紹
橡膠履帶機(jī)器人行駛機(jī)理研究,陜西省科技廳基金青年項(xiàng)目,2018JQ5116,2019-01至2021-12,3萬(wàn)元,已結(jié)題.
二、科研促進(jìn)教學(xué)案例
1.案例主要內(nèi)容
四擺臂六履帶智能移動(dòng)機(jī)器人系統(tǒng),如圖1所示。智能移動(dòng)機(jī)器人系統(tǒng)主要由機(jī)械系統(tǒng)、測(cè)控系統(tǒng)等組成。機(jī)器人機(jī)械系統(tǒng)主要部件有車體、擺臂裝置、履帶行走機(jī)構(gòu)、傳動(dòng)裝置等,擺臂裝置主要由前左擺臂、前右擺臂、后左擺臂、后右擺臂等組成。智能移動(dòng)機(jī)器人測(cè)控系統(tǒng)分為三個(gè)層次,即運(yùn)動(dòng)執(zhí)行控制層,傳感與信號(hào)處理層和決策控制層,如圖2所示。機(jī)器人系統(tǒng)配備有里程計(jì)、攝像系統(tǒng)、激光雷達(dá)、超聲波傳感器、紅外傳感器、陀螺儀、速度或加速度計(jì)等傳感器。

1-后左擺臂系統(tǒng),2-前左擺臂系統(tǒng),3-機(jī)器人本體,4-前右擺臂系統(tǒng),5-后右擺臂系統(tǒng)
圖1 智能移動(dòng)機(jī)器人機(jī)械系統(tǒng)圖
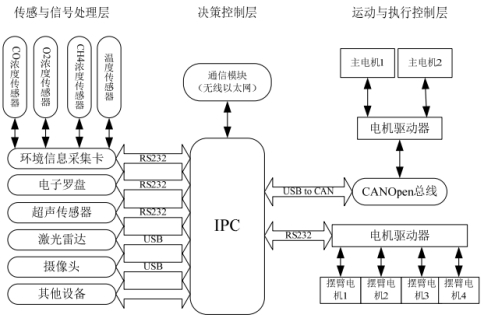
圖2智能移動(dòng)機(jī)器人測(cè)控系統(tǒng)圖
本案例已開(kāi)發(fā)相關(guān)實(shí)驗(yàn)平臺(tái)2套,發(fā)表論文20余篇,申請(qǐng)專利10余項(xiàng),可用于《機(jī)電一體化系統(tǒng)設(shè)計(jì)》《機(jī)器人技術(shù)》《機(jī)械控制工程基礎(chǔ)》等課程的案例教學(xué)。
2.案例實(shí)際應(yīng)用效果簡(jiǎn)介
(1)本案例長(zhǎng)期用于機(jī)械類各專業(yè)本科生《機(jī)電一體化系統(tǒng)設(shè)計(jì)》等多門課程的理論教學(xué),具有技術(shù)前沿性、綜合性和實(shí)用性特點(diǎn),能夠支撐學(xué)生創(chuàng)新能力和知識(shí)綜合應(yīng)用能力的培養(yǎng),啟發(fā)學(xué)生認(rèn)識(shí)并探索解決復(fù)雜機(jī)電工程問(wèn)題。
(2)本案例相關(guān)內(nèi)容已在張旭輝、樊紅衛(wèi)等主編《機(jī)電一體化系統(tǒng)設(shè)計(jì)》規(guī)劃教材中引用,主要服務(wù)于該教材“第3章 機(jī)電一體化機(jī)械系統(tǒng)設(shè)計(jì)”、“第5章 機(jī)電一體化檢測(cè)系統(tǒng)設(shè)計(jì)”、“第6章 機(jī)電一體化控制系統(tǒng)設(shè)計(jì)”、“第7章 機(jī)電一體化典型系統(tǒng)設(shè)計(jì)”等章節(jié)的講授,體現(xiàn)了教學(xué)內(nèi)容的新穎性和高階性。
3.支撐材料
(1)智能移動(dòng)機(jī)器人研制報(bào)告,含視頻、圖片等;
(2)已授權(quán)的發(fā)明專利
[1]基于無(wú)線通信傳播特性井下救援機(jī)器人通訊節(jié)點(diǎn)布放方法,專利號(hào):CN201611104717.6
[2]一種六履帶四擺臂救援機(jī)器人及其自主行走控制方法,專利號(hào):CN201610710117.8
[3]六履帶四擺臂救援機(jī)器人的自主越障避障行走控制方法,專利號(hào):CN201610709774.0
(3)已發(fā)表的主要參考論文
[1]王川偉,馬宏偉,薛旭升,楊林,王巖.煤礦履帶巡檢機(jī)器人多體動(dòng)力學(xué)建模及越障仿真[J].西安科技大學(xué)學(xué)報(bào),2020,40(05):790-796.
[2]楊林,馬宏偉,王巖,王川偉.煤礦井下移動(dòng)機(jī)器人運(yùn)動(dòng)規(guī)劃方法研究[J].工礦自動(dòng)化,2020,46(06):23-30.
[3]楊林,馬宏偉,王巖,王川偉,張珍珍.煤礦巡檢機(jī)器人同步定位與地圖構(gòu)建方法研究[J].工礦自動(dòng)化,2019,45(09):18-24.
[4]王川偉,馬琨,楊林,馬宏偉,薛旭升,田海波.四擺臂-六履帶機(jī)器人單側(cè)臺(tái)階障礙越障仿真與試驗(yàn)[J].農(nóng)業(yè)工程學(xué)報(bào),2018,34(10):46-53.
[5]薛旭升,馬宏偉,尚萬(wàn)峰.煤礦救援無(wú)線通信機(jī)器人系統(tǒng)設(shè)計(jì)[J].礦山機(jī)械,2015,43(04):104-107.
4.案例思考題
(1)地面應(yīng)用的智能移動(dòng)機(jī)器人系統(tǒng)設(shè)計(jì)需要考慮哪些因素?在井下應(yīng)用又需要考慮哪些因素?
(2)智能移動(dòng)機(jī)器人的行走機(jī)構(gòu)主要有哪些類型?
(3)智能移動(dòng)機(jī)器人在煤礦井下如何實(shí)現(xiàn)精確定位?
5.案例使用說(shuō)明
適用范圍:機(jī)械類專業(yè)本科三/四年級(jí)
配套教材:張旭輝,樊紅衛(wèi)等. 機(jī)電一體化系統(tǒng)設(shè)計(jì)[M]. 武漢:華中科技大學(xué)出版社,2020.
教學(xué)目的:掌握“移動(dòng)機(jī)器人系統(tǒng)”機(jī)械系統(tǒng)、檢測(cè)系統(tǒng)、控制系統(tǒng)的設(shè)計(jì)思路和方法。
教學(xué)建議:建議采用翻轉(zhuǎn)課堂教學(xué)法,學(xué)生通過(guò)查閱文獻(xiàn)自主完成設(shè)計(jì),課堂上教師給予針對(duì)性的指導(dǎo)。
6.案例聯(lián)系人
王川偉 wangchuanwei228@xust.edu.cn,18192953039
案例5:護(hù)盾式快速掘進(jìn)機(jī)器人系統(tǒng)
摘要:我國(guó)95%的煤礦采用井工開(kāi)采,長(zhǎng)期堅(jiān)持“采掘并重,掘進(jìn)先行”方針。綜采工作面智能化初見(jiàn)成效,而綜掘工作面智能化滯后,導(dǎo)致“采掘失衡”,嚴(yán)重影響煤礦安全、高效、智能生產(chǎn)。隨著煤炭開(kāi)采技術(shù)進(jìn)一步發(fā)展,所需掘進(jìn)隊(duì)伍和人員還將持續(xù)增加,造成生產(chǎn)、安全管理和掘進(jìn)成本大幅提高,無(wú)法滿足現(xiàn)代化礦井發(fā)展需要。現(xiàn)有懸臂式掘進(jìn)系統(tǒng)操作人員多、勞動(dòng)強(qiáng)度大、掘進(jìn)效率低,不能滿足快速、智能掘進(jìn)需求。針對(duì)復(fù)雜地質(zhì)條件煤巷快速智能掘進(jìn)難題,研發(fā)煤巷智能掘進(jìn)機(jī)器人系統(tǒng),包括系統(tǒng)總體設(shè)計(jì)、機(jī)械系統(tǒng)設(shè)計(jì)、動(dòng)力系統(tǒng)設(shè)計(jì)、檢測(cè)系統(tǒng)設(shè)計(jì)、控制系統(tǒng)設(shè)計(jì)等。系統(tǒng)通過(guò)礦井環(huán)網(wǎng)和地面環(huán)網(wǎng),在井下集控中心和地面監(jiān)控中心可實(shí)現(xiàn)人員安全預(yù)警、環(huán)境安全預(yù)警、設(shè)備故障預(yù)警、關(guān)鍵部位視頻監(jiān)控、三維地質(zhì)模型動(dòng)態(tài)更新和數(shù)字孿生驅(qū)動(dòng)的遠(yuǎn)程智能測(cè)控,及遠(yuǎn)程一鍵啟停,還具備對(duì)關(guān)鍵信息進(jìn)行實(shí)時(shí)存儲(chǔ)和歷史數(shù)據(jù)查詢等功能。
關(guān)鍵詞:掘進(jìn)機(jī)器人;智能掘進(jìn);智能測(cè)控
一、科研項(xiàng)目基本信息介紹
煤礦智能掘進(jìn)技術(shù)及成套裝備研發(fā)與示范項(xiàng)目,陜西煤業(yè)化工集團(tuán)小保當(dāng)?shù)V業(yè)有限公司, 2019-03 至 2020-06, 2080萬(wàn)元, 已結(jié)題.
二、科研促進(jìn)教學(xué)案例
1.案例主要內(nèi)容
護(hù)盾式煤礦智能掘進(jìn)機(jī)器人系統(tǒng)總體方案如圖1所示,集截割、支護(hù)、鉆錨、裝載、運(yùn)輸為一體,以截割機(jī)器人為核心,進(jìn)行集成控制和協(xié)同作業(yè)。該系統(tǒng)由全寬橫軸截割機(jī)器人、臨時(shí)支護(hù)機(jī)器人Ⅰ和Ⅱ、鉆錨機(jī)器人、超前探測(cè)與防沖卸壓系統(tǒng)、轉(zhuǎn)載運(yùn)輸系統(tǒng)、通風(fēng)除塵系統(tǒng)、電液控平臺(tái)等多機(jī)器人系統(tǒng)組成,通過(guò)多機(jī)器人系統(tǒng)協(xié)作完成掘進(jìn)任務(wù)。智能測(cè)控系統(tǒng)總體架構(gòu)如圖2所示,其包含三層,分別為本地控制層、近程集控層和遠(yuǎn)程監(jiān)控層。
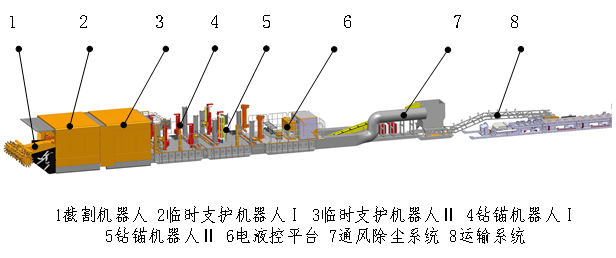
圖1 護(hù)盾式煤礦智能掘進(jìn)機(jī)器人機(jī)械系統(tǒng)組成
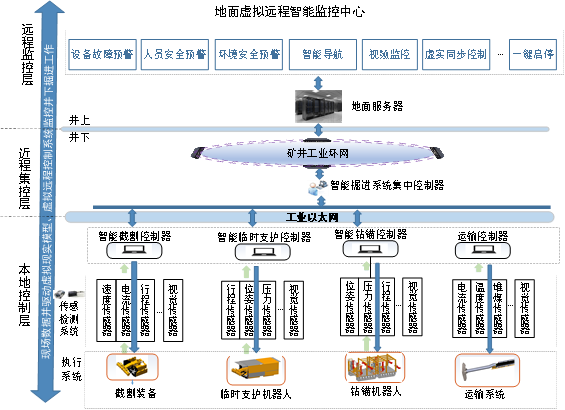
圖2 護(hù)盾式煤礦智能掘進(jìn)機(jī)器人測(cè)控系統(tǒng)組成
本案例已研發(fā)實(shí)物平臺(tái)1套,發(fā)表論文20余篇,申請(qǐng)專利10余項(xiàng),可用于《機(jī)電一體化系統(tǒng)設(shè)計(jì)》《機(jī)器人技術(shù)》《礦山設(shè)備與電氣控制》《機(jī)械控制工程基礎(chǔ)》等課程的案例教學(xué)。
2.案例實(shí)際應(yīng)用效果簡(jiǎn)介
(1)本案例長(zhǎng)期用于機(jī)械類各專業(yè)本科生《機(jī)電一體化系統(tǒng)設(shè)計(jì)》等多門課程的理論教學(xué),具有技術(shù)前沿性、綜合性和實(shí)用性特點(diǎn),能夠支撐學(xué)生創(chuàng)新能力和知識(shí)綜合應(yīng)用能力的培養(yǎng),啟發(fā)學(xué)生認(rèn)識(shí)并探索解決復(fù)雜機(jī)電工程問(wèn)題。
(2)本案例相關(guān)內(nèi)容已在相關(guān)煤礦實(shí)際應(yīng)用,通過(guò)科研成果轉(zhuǎn)化為教學(xué)案例,向?qū)W生講授最新科技前沿和現(xiàn)代化煤礦機(jī)器人產(chǎn)品,體現(xiàn)了教學(xué)內(nèi)容的先進(jìn)性和高階性。
3.支撐材料
(1)護(hù)盾式快速掘進(jìn)機(jī)器人系統(tǒng)研制報(bào)告,含視頻、圖片等;
(2)已授權(quán)的發(fā)明專利
[1]一種掘進(jìn)機(jī)遠(yuǎn)程控制系統(tǒng)及方法,專利號(hào):CN201410086340.0
[2]一種煤礦巷道智能掘進(jìn)機(jī)器人控制系統(tǒng),專利號(hào):CN202010690931.4
[3]一種滑靴式錨網(wǎng)運(yùn)輸機(jī)器人,專利號(hào):CN202010690410.9
(3)已發(fā)表的主要參考論文
[1]馬宏偉,楊金科,毛清華,汪強(qiáng).煤礦護(hù)盾式掘進(jìn)機(jī)器人系統(tǒng)精確定位研究[J].工礦自動(dòng)化,2022,48(03):63-70.
[2]高佳晨,馬宏偉,王川偉,薛旭升,姚陽(yáng).煤礦巷道掘進(jìn)錨網(wǎng)運(yùn)輸機(jī)器人結(jié)構(gòu)設(shè)計(jì)及運(yùn)動(dòng)規(guī)劃[J].煤炭工程,2021,53(11):175-180.
[3]馬宏偉,王鵬,王世斌,毛清華,石增武,夏晶,楊征,薛旭升,王川偉.煤礦掘進(jìn)機(jī)器人系統(tǒng)智能并行協(xié)同控制方法[J].煤炭學(xué)報(bào),2021,46(07):2057-2067.
[4]馬宏偉,王世斌,毛清華,石增武,張旭輝,楊征,曹現(xiàn)剛,薛旭升,夏晶,王川偉.煤礦巷道智能掘進(jìn)關(guān)鍵共性技術(shù)[J].煤炭學(xué)報(bào),2021,46(01):310-320.
[5]馬宏偉,王鵬,張旭輝,曹現(xiàn)剛,毛清華,王川偉,薛旭升,劉鵬,夏晶,董明,田海波.煤礦巷道智能掘進(jìn)機(jī)器人系統(tǒng)關(guān)鍵技術(shù)研究[J].西安科技大學(xué)學(xué)報(bào),2020,40(05):751-759.
4.案例思考題
(1)護(hù)盾式快速掘進(jìn)機(jī)器人系統(tǒng)設(shè)計(jì)需要考慮哪些因素?
(2)護(hù)盾式快速掘進(jìn)機(jī)器人系統(tǒng)比常規(guī)掘進(jìn)系統(tǒng)有哪些優(yōu)點(diǎn)?
(3)護(hù)盾式快速掘進(jìn)機(jī)器人系統(tǒng)在煤礦井下如何實(shí)現(xiàn)精確定位、導(dǎo)航?
5.案例使用說(shuō)明
適用范圍:機(jī)械類專業(yè)本科三/四年級(jí)
配套教材:張旭輝,樊紅衛(wèi)等. 機(jī)電一體化系統(tǒng)設(shè)計(jì)[M]. 武漢:華中科技大學(xué)出版社,2020.
教學(xué)目的:掌握“護(hù)盾式快速掘進(jìn)機(jī)器人系統(tǒng)”機(jī)械系統(tǒng)、檢測(cè)系統(tǒng)、控制系統(tǒng)的設(shè)計(jì)思路和方法。
教學(xué)建議:建議采用翻轉(zhuǎn)課堂教學(xué)法,學(xué)生通過(guò)查閱文獻(xiàn)自主完成設(shè)計(jì),課堂上教師給予針對(duì)性的指導(dǎo)。
6.案例聯(lián)系人
王川偉 wangchuanwei228@xust.edu.cn,18192953039
案例6:龍門鉆錨機(jī)器人系統(tǒng)
摘要:針對(duì)煤礦巷道掘進(jìn)面臨高瓦斯、頂幫支護(hù)任務(wù)重、底板起伏大、瓦斯粉塵威脅大等難題,研制一種龍門式鉆錨機(jī)器人。機(jī)器人與傳統(tǒng)懸臂式掘進(jìn)機(jī)交互工作,通過(guò)人機(jī)協(xié)同完成頂板錨桿及側(cè)幫錨桿的鉆錨任務(wù);側(cè)幫鉆機(jī)既可在龍門框架的前端布置,又可在龍門框架的后端布置,以適應(yīng)不同側(cè)幫穩(wěn)定性的要求;采用防碰撞措施防止龍門式鉆錨機(jī)器人、懸臂式掘進(jìn)機(jī)在移動(dòng)或作業(yè)過(guò)程中發(fā)生干涉。該系統(tǒng)對(duì)提高復(fù)雜地質(zhì)條件掘進(jìn)效率,減少作業(yè)人員,保證安全生產(chǎn),對(duì)破解我國(guó)復(fù)雜地質(zhì)條件的巷道支護(hù)難題具有很好的借鑒和示范作用。
關(guān)鍵詞:鉆錨機(jī)器人;龍門框架;巷道支護(hù);臂式掘進(jìn)機(jī)
一、科研項(xiàng)目基本信息介紹
桑樹(shù)坪二號(hào)井復(fù)雜地質(zhì)條件下龍門式鉆錨機(jī)器人研制與應(yīng)用項(xiàng)目,陜西陜煤韓城礦業(yè)有限公司, 2021-01 至 2021-09,已結(jié)題
二、科研促進(jìn)教學(xué)案例
1.案例主要內(nèi)容
智能龍門鉆機(jī)器人系統(tǒng)主要包括傳統(tǒng)掘進(jìn)機(jī)、履帶式龍門鉆錨機(jī)器人、通風(fēng)除塵裝置、主運(yùn)皮帶和二運(yùn)皮帶及其他傳統(tǒng)輔助設(shè)備,空間關(guān)系是掘進(jìn)機(jī)為首在工作面掘進(jìn),鉆錨機(jī)器人在后方距工作面迎頭10m處,風(fēng)筒為定制風(fēng)筒,在煤壁左側(cè),掛在已打好的側(cè)幫錨桿上,主運(yùn)皮帶連在掘進(jìn)的后面。智能龍門鉆機(jī)器人系統(tǒng)俯視圖如下圖1。
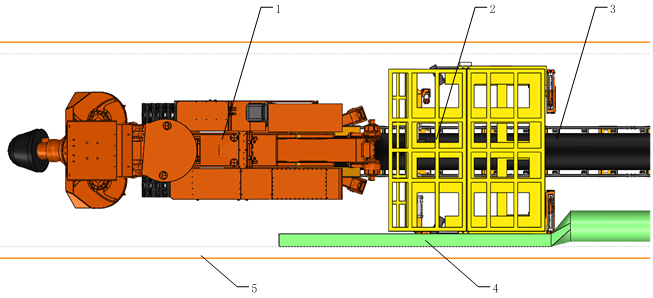
1-掘進(jìn)機(jī)器人 2-履帶式龍門鉆錨機(jī)器人 3-二運(yùn)皮帶 4-風(fēng)筒 5-巷道
圖1 智能龍門鉆機(jī)器人系統(tǒng)
本案例已研發(fā)實(shí)物平臺(tái)1套,發(fā)表論文10余篇,申請(qǐng)專利10余項(xiàng),可用于《機(jī)電一體化系統(tǒng)設(shè)計(jì)》《機(jī)器人技術(shù)》《礦山設(shè)備與電氣控制》《機(jī)械控制工程基礎(chǔ)》等課程的案例教學(xué)。
2.案例實(shí)際應(yīng)用效果簡(jiǎn)介
(1)本案例長(zhǎng)期用于機(jī)械類各專業(yè)本科生《機(jī)電一體化系統(tǒng)設(shè)計(jì)》等多門課程的理論教學(xué),具有技術(shù)前沿性、綜合性和實(shí)用性特點(diǎn),能夠支撐學(xué)生創(chuàng)新能力和知識(shí)綜合應(yīng)用能力的培養(yǎng),啟發(fā)學(xué)生認(rèn)識(shí)并探索解決復(fù)雜機(jī)電工程問(wèn)題。
(2)本案例相關(guān)內(nèi)容已在相關(guān)煤礦實(shí)際應(yīng)用,通過(guò)科研成果轉(zhuǎn)化為教學(xué)案例,向?qū)W生講授最新科技前沿和現(xiàn)代化煤礦機(jī)器人產(chǎn)品,體現(xiàn)了教學(xué)內(nèi)容的先進(jìn)性和高階性。
3.支撐材料
(1)龍門鉆錨機(jī)器人系統(tǒng)研制報(bào)告,含視頻、圖片等;
(2)已授權(quán)的發(fā)明專利
[1]一種龍門式掘護(hù)錨機(jī)器人系統(tǒng),專利號(hào):CN202010950447.0
[2]龍門式多鉆機(jī)并行鉆錨機(jī)器人,專利號(hào):CN202010690935.2
[3]一種懸臂式掘進(jìn)機(jī)截割頭位姿視覺(jué)測(cè)量方法,專利號(hào):CN201710443405.6
(3)已發(fā)表的主要參考論文
[1]梁林,馬宏偉,趙昊.復(fù)雜地質(zhì)條件煤礦巷道龍門式鉆錨機(jī)器人研究[J].煤炭工程,2021,53(11):181-185.
[2]馬宏偉,王成龍,尚東森,薛旭升,薛力猛.煤礦井下鉆錨機(jī)器人布網(wǎng)單元設(shè)計(jì)與仿真[J].煤炭工程,2019,51(06):160-164.
[3]楊文娟,張旭輝,馬宏偉,劉志明.懸臂式掘進(jìn)機(jī)機(jī)身及截割頭位姿視覺(jué)測(cè)量系統(tǒng)研究[J].煤炭科學(xué)技術(shù),2019,47(06):50-57.
[4]馬宏偉,尚東森,楊宇婷.煤礦鉆錨機(jī)器人自動(dòng)鉆錨單元的設(shè)計(jì)與仿真分析[J].煤礦機(jī)械,2018,39(10):3-6.
4.案例思考題
(1)復(fù)雜地質(zhì)條件下鉆錨機(jī)器人系統(tǒng)設(shè)計(jì)需要考慮哪些因素?
(2)履帶式鉆錨機(jī)器人如何實(shí)現(xiàn)井下精確定位與控制?
(3)懸臂式掘進(jìn)機(jī)如何實(shí)現(xiàn)巷道斷面精確截割?
5.案例使用說(shuō)明
適用范圍:機(jī)械類專業(yè)本科三/四年級(jí)
配套教材:張旭輝,樊紅衛(wèi)等. 機(jī)電一體化系統(tǒng)設(shè)計(jì)[M]. 武漢:華中科技大學(xué)出版社,2020.
教學(xué)目的:掌握“龍門鉆錨機(jī)器人系統(tǒng)”機(jī)械系統(tǒng)、檢測(cè)系統(tǒng)、控制系統(tǒng)的設(shè)計(jì)思路和方法。
教學(xué)建議:建議采用翻轉(zhuǎn)課堂教學(xué)法,學(xué)生通過(guò)查閱文獻(xiàn)自主完成設(shè)計(jì),課堂上教師給予針對(duì)性的指導(dǎo)。
6.案例聯(lián)系人
王川偉 wangchuanwei228@xust.edu.cn,18192953039
案例7:煤礦綜采工作面數(shù)字孿生監(jiān)控系統(tǒng)
摘要:本案例針對(duì)煤礦綜采工作面設(shè)備的虛擬遠(yuǎn)程監(jiān)控問(wèn)題,以unity3D平臺(tái)為軟件開(kāi)發(fā)工具,設(shè)計(jì)開(kāi)發(fā)基于綜采三機(jī)設(shè)備數(shù)字孿生建模的遠(yuǎn)程監(jiān)控系統(tǒng),通過(guò)真實(shí)再現(xiàn)與還原煤礦設(shè)備以及生產(chǎn)場(chǎng)景,利用各類工況傳感器采集設(shè)備位姿信息,實(shí)現(xiàn)虛擬設(shè)備與真實(shí)設(shè)備的同步控制,建立設(shè)備虛擬模型的運(yùn)動(dòng)控制方法,實(shí)現(xiàn)數(shù)字孿生特性下的虛擬控制技術(shù),最終實(shí)現(xiàn)對(duì)于綜采設(shè)備的遠(yuǎn)程虛擬監(jiān)控。
關(guān)鍵詞:綜采工作面;虛擬仿真;數(shù)字孿生;虛實(shí)同步
一、科研項(xiàng)目基本信息介紹
該案例源自西安煤礦機(jī)械有限公司委托橫向課題的研發(fā)成果,首先在實(shí)驗(yàn)室利用真實(shí)比例縮小的設(shè)備模型實(shí)現(xiàn)遠(yuǎn)程監(jiān)控功能,近年來(lái)代表陜煤集團(tuán)等企業(yè)進(jìn)行設(shè)備遠(yuǎn)程虛擬控制技術(shù)展示,并衍生掘進(jìn)設(shè)備智能控制等技術(shù),在多個(gè)煤礦現(xiàn)場(chǎng)進(jìn)行工業(yè)試驗(yàn),效果良好。
二、科研促進(jìn)教學(xué)案例
1.案例主要內(nèi)容
“煤礦綜采工作面數(shù)字孿生監(jiān)控系統(tǒng)”如圖1所示,利用三維建模軟件搭建綜采工作面虛擬模型與虛擬場(chǎng)景,采用虛擬仿真平臺(tái)設(shè)計(jì)數(shù)字孿生監(jiān)控程序,根據(jù)真實(shí)采煤過(guò)程設(shè)計(jì)虛擬樣機(jī)動(dòng)作以及相互配合關(guān)系。結(jié)合各類工況傳感器,實(shí)現(xiàn)從真實(shí)設(shè)備通過(guò)數(shù)據(jù)融合與智能感知、數(shù)據(jù)模型優(yōu)化,最終實(shí)現(xiàn)在數(shù)字空間對(duì)綜采工作面設(shè)備的虛實(shí)同步控制。
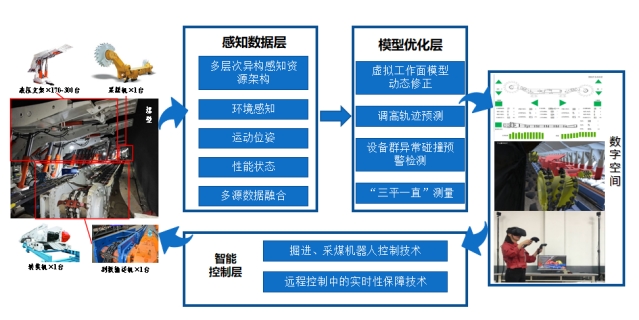
圖1煤礦綜采工作面數(shù)字孿生監(jiān)控系統(tǒng)
本案例已開(kāi)發(fā)相關(guān)虛擬仿真實(shí)驗(yàn)平臺(tái)1套,相關(guān)虛擬仿真實(shí)驗(yàn)4個(gè),發(fā)表論文20余篇,申請(qǐng)專利10項(xiàng),登記軟著6件,可用于《機(jī)電一體化系統(tǒng)設(shè)計(jì)》《礦山機(jī)械》《礦山設(shè)備與電氣控制》等課程的案例教學(xué)。
2.案例實(shí)際應(yīng)用效果簡(jiǎn)介
(1)本案例長(zhǎng)期用于機(jī)械類各專業(yè)本科生《機(jī)電一體化系統(tǒng)設(shè)計(jì)》《礦山設(shè)備與電氣控制》等多門課程的理論教學(xué),能夠支撐煤礦機(jī)械、智能采礦、遠(yuǎn)程監(jiān)控、信號(hào)處理等教學(xué)內(nèi)容講授。
(2)本案例相關(guān)內(nèi)容已部署西安科技大學(xué)機(jī)械工程學(xué)院虛擬仿真線上平臺(tái),已對(duì)全校多專業(yè)、校外同行業(yè)技術(shù)人員開(kāi)放。
3.支撐材料
(1)“煤礦綜采工作面數(shù)字孿生監(jiān)控系統(tǒng)”國(guó)家一流課程虛擬仿真實(shí)驗(yàn)申報(bào)書(shū)、虛擬仿真實(shí)驗(yàn)說(shuō)明書(shū);
(2)煤礦綜采工作面數(shù)字孿生監(jiān)控系統(tǒng)操作視頻、圖片等。
4.案例思考題
(1)簡(jiǎn)述礦山設(shè)備控制方式,簡(jiǎn)述自動(dòng)控制系統(tǒng)的組成,有哪些性能指標(biāo)?
(2)簡(jiǎn)述綜采工作面采煤工藝過(guò)程,描述三機(jī)設(shè)備工作原理。
(3)設(shè)計(jì)綜采設(shè)備數(shù)字孿生控制系統(tǒng)界面。
5.案例使用說(shuō)明
適用范圍:機(jī)械類專業(yè)本科三/四年級(jí)
配套教材:張旭輝,樊紅衛(wèi)等. 機(jī)電一體化系統(tǒng)設(shè)計(jì)[M]. 武漢:華中科技大學(xué)出版社,2020.
教學(xué)目的:掌握“煤礦綜采工作面數(shù)字孿生監(jiān)控系統(tǒng)”有助于培養(yǎng)學(xué)生在三維建模以及煤礦設(shè)備遠(yuǎn)程監(jiān)控方案設(shè)計(jì)與實(shí)際開(kāi)發(fā)能力的訓(xùn)練。
教學(xué)建議:建議采用結(jié)合線上實(shí)驗(yàn)教學(xué)平臺(tái)的方法,學(xué)生通過(guò)線上虛擬仿真實(shí)驗(yàn)平臺(tái)完成設(shè)計(jì),課堂上教師給予針對(duì)性的指導(dǎo)。
6.案例聯(lián)系人
張旭輝 zhangxh@xust.edu.cn,13363975328
杜昱陽(yáng) 1090973350@qq.com,13110413501
案例8:煤礦掘進(jìn)裝備定位與控制系統(tǒng)
摘要:煤礦巷道掘進(jìn)受井下巷道特殊的非結(jié)構(gòu)化環(huán)境及相對(duì)復(fù)雜工藝環(huán)節(jié)制約,“采掘失衡”現(xiàn)象突出,圍繞“煤礦掘進(jìn)設(shè)備長(zhǎng)距離高精度定位”行業(yè)卡脖子問(wèn)題,聚焦掘進(jìn)設(shè)備長(zhǎng)距離動(dòng)態(tài)精確定位方法等研究,破解了惡劣環(huán)境下狹長(zhǎng)空間的視覺(jué)精確定位難題,研發(fā)出一套煤礦掘進(jìn)工作面智能操控系統(tǒng),形成了井下巷道掘進(jìn)裝備精確定位、定向?qū)Ш胶投ㄐ谓馗罴夹g(shù)。具體功能如下:①基于激光束合作標(biāo)靶的掘進(jìn)機(jī)機(jī)身位姿視覺(jué)測(cè)量;②掘進(jìn)機(jī)定向?qū)Ш脚c自主糾偏控制;③矩形、拱形等不同巷道截面自動(dòng)成形控制;④人工示教成形軌跡智能生成;⑤視覺(jué)伺服記憶截割;⑥巷道截割軌跡實(shí)時(shí)顯示、超挖欠挖報(bào)警和虛擬遠(yuǎn)程操控等功能。
關(guān)鍵詞:智能掘進(jìn);視覺(jué)定位;記憶截割;成形控制
一、科研項(xiàng)目基本信息介紹
2014年以來(lái),張旭輝教授聚焦巷道近程或地面遠(yuǎn)程智能掘進(jìn)場(chǎng)景控制需求,帶領(lǐng)團(tuán)隊(duì)不斷探究智能掘進(jìn)關(guān)鍵技術(shù)難題,為煤礦巷道掘進(jìn)智能化相關(guān)理論與技術(shù)研究奠定了堅(jiān)實(shí)基礎(chǔ),通過(guò)對(duì)煤礦智能化裝備的創(chuàng)新研發(fā),在煤礦采掘工作面智能截割技術(shù)、虛擬數(shù)字工作面構(gòu)建及遠(yuǎn)程控制、智能采掘裝備研發(fā)方面突破了多項(xiàng)關(guān)鍵核心技術(shù),以“DT+VR” 遠(yuǎn)程決策、“視覺(jué)+”位姿測(cè)量、“人工示教”記憶截割,以及“虛擬設(shè)備”碰撞預(yù)警等四大核心技術(shù),解決了智能決策、精確定位(定向?qū)Ш胶统尚钨|(zhì)量的基礎(chǔ))、軌跡規(guī)劃和設(shè)備群碰撞預(yù)警難題。核心技術(shù)先后在陜煤小保當(dāng)、榆林大海則、山西王家?guī)X等煤礦井下掘進(jìn)工作面進(jìn)行了驗(yàn)證,為解決煤礦遠(yuǎn)程智能掘進(jìn)提供了新的實(shí)現(xiàn)路徑。為全面推進(jìn)煤礦智能化發(fā)展積累了寶貴的經(jīng)驗(yàn),通過(guò)不斷地進(jìn)行理論、技術(shù)與裝備創(chuàng)新,為推動(dòng)我國(guó)煤炭工業(yè)快速發(fā)展提供有力支撐。
二、科研促進(jìn)教學(xué)案例
1.案例主要內(nèi)容
煤礦掘進(jìn)裝備定位與控制系統(tǒng)主要由紅外防爆標(biāo)靶、激光指向儀、前置防爆工業(yè)相機(jī)、后置防爆工業(yè)相機(jī)、防爆計(jì)算機(jī)、毫米波雷達(dá)、PLC、捷聯(lián)慣導(dǎo)等構(gòu)成。煤礦掘進(jìn)裝備定位與控制系統(tǒng)如圖1所示。

圖1煤礦掘進(jìn)裝備定位與控制系統(tǒng)實(shí)驗(yàn)平臺(tái)
前置防爆相機(jī)和后置防爆相機(jī)分別面向前后固定于機(jī)身上;紅外標(biāo)靶固定于掘進(jìn)機(jī)截割臂上;將激光指向儀固定于巷道頂部的錨桿上,毫米波雷達(dá)固定放在機(jī)身兩側(cè),PLC與捷聯(lián)慣導(dǎo)安裝在防爆電控箱內(nèi)。其中,前置防爆工業(yè)相機(jī)、紅外標(biāo)靶和防爆計(jì)算機(jī)構(gòu)成截割頭視覺(jué)測(cè)量系統(tǒng),后置防爆工業(yè)相機(jī)與激光指向儀和防爆計(jì)算機(jī)構(gòu)成掘進(jìn)機(jī)機(jī)身位姿測(cè)量系統(tǒng),捷聯(lián)慣導(dǎo)用來(lái)獲取掘進(jìn)機(jī)實(shí)時(shí)姿態(tài)信息,毫米波雷達(dá)獲取掘進(jìn)機(jī)到截割斷面煤壁的距離。圖2、3分別為掘錨一體機(jī)高精度組合定位系統(tǒng)軟件界面,及掘進(jìn)機(jī)可視化自動(dòng)截割軟件界面。
掘進(jìn)裝備定位與控制系統(tǒng)工作原理:利用前置防爆工業(yè)相機(jī)采集紅外防爆標(biāo)靶的圖像,后置防爆相機(jī)采集激光指向儀的圖像信息,將采集到的圖像經(jīng)以太網(wǎng)傳輸至防爆計(jì)算機(jī)中,在計(jì)算機(jī)中分別對(duì)紅外LED特征圖像和激光圖像進(jìn)行圖像處理,獲取標(biāo)靶紅外點(diǎn)特征和激光點(diǎn)線特征信息。通過(guò)構(gòu)建測(cè)量系統(tǒng)全局坐標(biāo)系,利用單目視覺(jué)測(cè)量原理,建立基于共面特征點(diǎn)的截割頭位姿視覺(jué)測(cè)量模型和掘進(jìn)機(jī)機(jī)身位姿視覺(jué)測(cè)量模型,結(jié)合所得圖像特征解算掘進(jìn)機(jī)截割頭和機(jī)身在巷道坐標(biāo)系下的位姿坐標(biāo)。再融合捷聯(lián)慣導(dǎo)和毫米波雷達(dá)數(shù)據(jù)等傳感器信息最終得到懸臂式掘進(jìn)機(jī)截割頭、機(jī)身位姿以及掘進(jìn)機(jī)狀態(tài)信息。建立截割臂自動(dòng)控制模型和定向掘進(jìn)控制模型,以掘進(jìn)機(jī)截割頭和機(jī)身位置信息為反饋,與規(guī)劃的路徑或期望位置進(jìn)行比較得到掘進(jìn)機(jī)位置偏差,結(jié)合相應(yīng)控制算法通過(guò)PLC控制向掘進(jìn)機(jī)電液比例閥發(fā)送控制命令,控制掘進(jìn)機(jī)的液壓系統(tǒng)驅(qū)動(dòng)掘進(jìn)機(jī)截割臂和左右履帶運(yùn)動(dòng),實(shí)現(xiàn)掘進(jìn)機(jī)自動(dòng)控制。
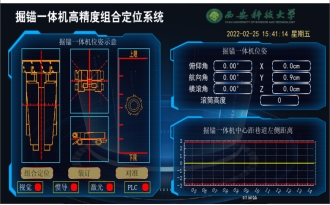

圖2 掘錨一體機(jī)高精度組合定位系統(tǒng)軟件界面 圖3 掘進(jìn)機(jī)可視化自動(dòng)截割軟件界面
本案例已開(kāi)發(fā)相關(guān)實(shí)驗(yàn)平臺(tái)2套,發(fā)表論文40余篇,申請(qǐng)專利21項(xiàng),登記軟著3件,相關(guān)成果獲省部級(jí)以上科技獎(jiǎng) 10 余項(xiàng),可用于《機(jī)電一體化系統(tǒng)設(shè)計(jì)》、《機(jī)械工程測(cè)試技術(shù)》《礦山設(shè)備與電氣控制》等課程的案例教學(xué)。
2.案例實(shí)際應(yīng)用效果簡(jiǎn)介
(1)本案例應(yīng)用于機(jī)械類各專業(yè)本科生《機(jī)電一體化系統(tǒng)設(shè)計(jì)》、《礦山設(shè)備檢測(cè)與控制》等多門課程的理論教學(xué),具有前沿性、學(xué)科交叉性、綜合性和實(shí)用性特點(diǎn),該案例煤礦行業(yè)特色鮮明,能夠有助于學(xué)生創(chuàng)新能力和知識(shí)綜合應(yīng)用能力的培養(yǎng),啟發(fā)學(xué)生認(rèn)識(shí)并探索解決實(shí)際復(fù)雜機(jī)電工程問(wèn)題,增強(qiáng)學(xué)生利用所學(xué)知識(shí)服務(wù)煤礦行業(yè)發(fā)展的責(zé)任與意識(shí)。
(2)本案例相關(guān)內(nèi)容已在《機(jī)電一體化系統(tǒng)設(shè)計(jì)》、《礦山設(shè)備檢測(cè)與控制》規(guī)劃教材中引用,主要服務(wù)于該教材“第7章 機(jī)電一體化典型系統(tǒng)設(shè)計(jì)”的講授,體現(xiàn)了教學(xué)內(nèi)容的前沿性、創(chuàng)新性和高階性。
3.支撐材料
(1)企業(yè)合作項(xiàng)目,中煤(天津)地下工程智能研究院有限公司,掘進(jìn)機(jī)機(jī)身高精度組合式自動(dòng)定位技術(shù);
(2)企業(yè)合作項(xiàng)目,陜西敏斯特智能科技有限公司,礦用掘進(jìn)機(jī)位姿測(cè)量系統(tǒng)開(kāi)發(fā);
(3)企業(yè)合作項(xiàng)目,山東天河科技股份有限公司,巷道掘進(jìn)視覺(jué)定位與導(dǎo)航系統(tǒng);
(4)企業(yè)合作項(xiàng)目,中煤(天津)地下工程智能研究院有限公司,中煤大海則煤礦智能化掘進(jìn)工作面研究與應(yīng)用——掘錨一體機(jī)實(shí)時(shí)姿態(tài)監(jiān)測(cè)、長(zhǎng)距離精確定位技術(shù)研究;
(5)國(guó)家自然科學(xué)基金青年項(xiàng)目,礦用防爆相機(jī)折射成像建模與多激光束掘進(jìn)設(shè)備視覺(jué)定位方法;
(6)張旭輝,趙建勛,楊文娟,張超.懸臂式掘進(jìn)機(jī)視覺(jué)導(dǎo)航與定向掘進(jìn)控制技術(shù)[J].煤炭學(xué)報(bào),2021,46(07): 2186-2196.
(7)張旭輝,楊文娟,薛旭升,等.煤礦遠(yuǎn)程智能掘進(jìn)面臨的挑戰(zhàn)與研究進(jìn)展[J].煤炭學(xué)報(bào),2022,47(01):579-597.
(8)楊文娟,張旭輝,張超,萬(wàn)繼成,杜昱陽(yáng),楊紅強(qiáng),石碩.基于三激光束標(biāo)靶的煤礦井下長(zhǎng)距離視覺(jué)定位方法[J].煤炭學(xué)報(bào),2022,47(02):986-1001.
(9)掘進(jìn)機(jī)定位與控制系統(tǒng)的相關(guān)視頻、圖片等。
4.案例思考題
(1)煤礦井下采掘設(shè)備定位方法有哪些?它們的工作原理分別是什么?
(2)視覺(jué)測(cè)量技術(shù)在井下采掘設(shè)備位姿測(cè)量方面有哪些優(yōu)勢(shì)?視覺(jué)測(cè)量技術(shù)在井下應(yīng)用時(shí)可能遇到哪些問(wèn)題?
(3)掘進(jìn)機(jī)成型截割的工藝流程是什么?如何利用視覺(jué)伺服控制實(shí)現(xiàn)掘進(jìn)機(jī)自主成型截割?
5.案例使用說(shuō)明
適用范圍:機(jī)械類專業(yè)本科三/四年級(jí)
配套教材:張旭輝,樊紅衛(wèi)等. 機(jī)電一體化系統(tǒng)設(shè)計(jì)[M]. 武漢:華中科技大學(xué)出版社,2020.
教學(xué)目的:掌握掘進(jìn)機(jī)定位與控制系統(tǒng)的硬件構(gòu)成、以及檢測(cè)模塊與控制模塊的基本理論和方法。
教學(xué)建議:建議采用翻轉(zhuǎn)課堂教學(xué)法,學(xué)生通過(guò)查閱文獻(xiàn)自主完成設(shè)計(jì),課堂上教師給予針對(duì)性的指導(dǎo)。
6.案例聯(lián)系人
張旭輝 zhangxh@xust.edu.cn,13363975328
楊文娟 yangwj@xust.edu.cn,15109269269
案例9:煤礦主通風(fēng)機(jī)狀態(tài)監(jiān)測(cè)與故障診斷系統(tǒng)
摘要:主通風(fēng)機(jī)是煤礦安全生產(chǎn)的重大關(guān)鍵設(shè)備,其可靠穩(wěn)定運(yùn)行對(duì)煤礦通風(fēng)安全至關(guān)重要。由于風(fēng)載不穩(wěn)定、顆粒物擊打葉片、軸承磨損和煤泥粘結(jié)等原因,通風(fēng)機(jī)的轉(zhuǎn)子-軸承系統(tǒng)難免引發(fā)異常振動(dòng)或聲響。采用壓電式加速度傳感器采集通風(fēng)機(jī)殼體振動(dòng)信號(hào),通過(guò)時(shí)域分析、頻域分析甚至?xí)r頻分析能夠揭示信號(hào)變化規(guī)律,提取信號(hào)特征信息,將其與設(shè)備結(jié)構(gòu)、工況等關(guān)聯(lián),能夠診斷其機(jī)械故障。該案例是煤礦智能安全生產(chǎn)的關(guān)鍵技術(shù)之一,能夠用于《機(jī)械工程測(cè)試技術(shù)》《機(jī)械設(shè)備故障診斷技術(shù)》《機(jī)電一體化系統(tǒng)設(shè)計(jì)》等課程中“壓電式傳感器”“機(jī)械故障診斷”“虛擬儀器”等內(nèi)容的案例教學(xué)。
關(guān)鍵詞:煤礦;主通風(fēng)機(jī);狀態(tài)監(jiān)測(cè);故障診斷
一、科研項(xiàng)目基本信息介紹
樊紅衛(wèi),張旭輝,姜俊英,萬(wàn)翔,毛清華,薛旭升,董明. 陜西煤業(yè)化工技術(shù)研究院有限責(zé)任公司,煤礦旋轉(zhuǎn)機(jī)械在線診斷及故障預(yù)警系統(tǒng)軟件開(kāi)發(fā),2018-07至2019-11,37萬(wàn)元,已結(jié)題
二、科研促進(jìn)教學(xué)案例
1.案例主要內(nèi)容
開(kāi)發(fā)的“煤礦主通風(fēng)機(jī)狀態(tài)監(jiān)測(cè)與故障診斷系統(tǒng)”如圖1所示。為了實(shí)時(shí)監(jiān)控煤礦主通風(fēng)機(jī)的運(yùn)行狀態(tài),設(shè)計(jì)了振動(dòng)在線監(jiān)測(cè)與故障診斷系統(tǒng)。系統(tǒng)接入振動(dòng)信號(hào),多個(gè)通道同步采集振動(dòng)信息,經(jīng)信號(hào)預(yù)處理后分別進(jìn)行時(shí)域和頻域分析;結(jié)合設(shè)備實(shí)際運(yùn)行狀況,設(shè)置故障閾值以判斷設(shè)備當(dāng)前狀態(tài)和故障情況。在某煤礦主通風(fēng)機(jī)上進(jìn)行了生產(chǎn)現(xiàn)場(chǎng)應(yīng)用驗(yàn)證,實(shí)際提取的通風(fēng)機(jī)特征頻率與理論計(jì)算值誤差小于5%,證明系統(tǒng)功能正常、數(shù)據(jù)分析準(zhǔn)確可靠。
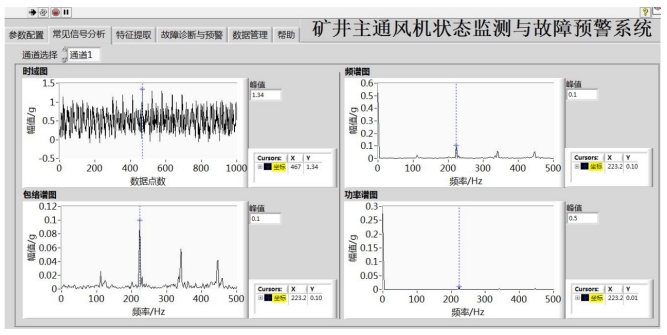
圖1 煤礦主通風(fēng)機(jī)狀態(tài)監(jiān)測(cè)與故障診斷系統(tǒng)
以陜西彬長(zhǎng)文家坡礦業(yè)有限公司路村風(fēng)井1#主通風(fēng)機(jī)為例,結(jié)合現(xiàn)場(chǎng)實(shí)際情況,在通風(fēng)機(jī)葉片附近布置三個(gè)振動(dòng)加速度傳感器,利用開(kāi)發(fā)的通風(fēng)機(jī)振動(dòng)在線監(jiān)測(cè)與故障診斷系統(tǒng)連續(xù)實(shí)時(shí)監(jiān)測(cè)通風(fēng)機(jī)運(yùn)行狀態(tài)。上位機(jī)軟件開(kāi)通三個(gè)采集通道,每個(gè)通道采樣頻率為6.25KHz,診斷模式選擇“故障分類”,故障閾值設(shè)置為10,風(fēng)機(jī)運(yùn)行轉(zhuǎn)速495r/min。上位機(jī)連續(xù)運(yùn)行16小時(shí)后,監(jiān)測(cè)結(jié)果如圖2所示。圖中,左上角為時(shí)域振動(dòng)波形,左下角為FFT譜圖,中間上方為測(cè)點(diǎn)指示圖,下方為歷史趨勢(shì)顯示,右上角為故障燈和文字提示區(qū),右下角為故障記錄區(qū)。
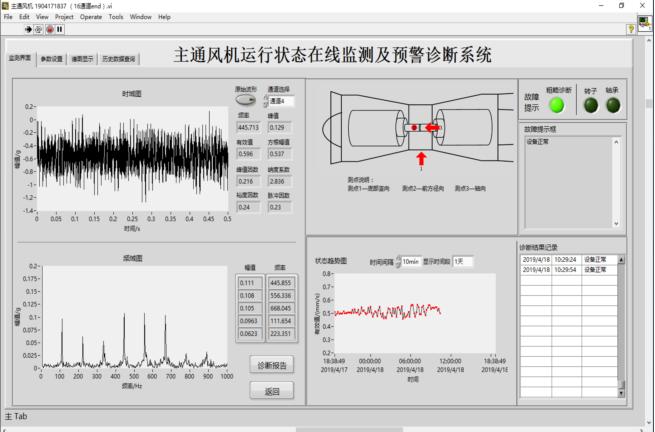
圖2 系統(tǒng)在某煤礦實(shí)際應(yīng)用界面
本案例已開(kāi)發(fā)相關(guān)軟件系統(tǒng)1套,發(fā)表論文10余篇,申請(qǐng)專利1項(xiàng),登記軟著1件,可用于《機(jī)械工程測(cè)試技術(shù)》《機(jī)械設(shè)備故障診斷技術(shù)》《礦山設(shè)備與電氣控制》《機(jī)電一體化系統(tǒng)設(shè)計(jì)》等課程的案例教學(xué)。
2.案例實(shí)際應(yīng)用效果簡(jiǎn)介
(1)本案例長(zhǎng)期用于機(jī)械類各專業(yè)本科生多門專業(yè)課程的理論教學(xué),具有技術(shù)前沿性、綜合性和實(shí)用性特點(diǎn),能夠支撐學(xué)生創(chuàng)新能力和知識(shí)綜合應(yīng)用能力的培養(yǎng),啟發(fā)學(xué)生認(rèn)識(shí)并探索解決復(fù)雜機(jī)電工程問(wèn)題。
(2)本案例相關(guān)內(nèi)容已在張旭輝、樊紅衛(wèi)等主編《機(jī)電一體化系統(tǒng)設(shè)計(jì)》規(guī)劃教材中引用,主要服務(wù)于該教材“第5章 機(jī)電一體化檢測(cè)系統(tǒng)設(shè)計(jì)——5.4 設(shè)備健康監(jiān)測(cè)常用傳感器及檢測(cè)技術(shù)”等章節(jié)的講授,體現(xiàn)了教學(xué)內(nèi)容的新穎性和高階性。
3.支撐材料
(1)“煤礦旋轉(zhuǎn)機(jī)械在線診斷及故障預(yù)警系統(tǒng)軟件開(kāi)發(fā)”項(xiàng)目結(jié)題報(bào)告;
(2)已發(fā)表的主要參考論文
[1]楊一晴,馬宏偉,樊紅衛(wèi),張超,張勇強(qiáng),韓磊. 礦井主通風(fēng)機(jī)振動(dòng)在線監(jiān)測(cè)與故障診斷系統(tǒng)及試驗(yàn)[J]. 煤礦機(jī)械,2019, 40(12): 161-163.
[2]楊一晴,馬宏偉,樊紅衛(wèi),張旭輝,張超,韓磊. 煤礦旋轉(zhuǎn)機(jī)械在線故障診斷及預(yù)警系統(tǒng)設(shè)計(jì)[J]. 工礦自動(dòng)化,2019, 45(10): 104-108.
[3]樊紅衛(wèi),楊一晴,邵偲潔,張超. 一種轉(zhuǎn)子振動(dòng)故障診斷及預(yù)警的虛擬儀器系統(tǒng)開(kāi)發(fā)與驗(yàn)證[J]. 機(jī)械設(shè)計(jì)與制造,2019, (6): 77-79, 83.
4.案例思考題
(1)壓電式加速度傳感器與電渦流位移傳感器測(cè)振動(dòng)信號(hào)有何區(qū)別?
(2)針對(duì)非平穩(wěn)信號(hào),如果采用普通FFT,會(huì)產(chǎn)生什么問(wèn)題?如何解決此問(wèn)題?
(3)礦用設(shè)備狀態(tài)監(jiān)測(cè)系統(tǒng)相比普通監(jiān)測(cè)系統(tǒng)有何特殊要求?
5.案例使用說(shuō)明
適用范圍:機(jī)械類專業(yè)本科三/四年級(jí)
配套教材:張旭輝,樊紅衛(wèi)等. 機(jī)電一體化系統(tǒng)設(shè)計(jì)[M]. 武漢:華中科技大學(xué)出版社,2020.
教學(xué)目的:掌握“煤礦主通風(fēng)機(jī)狀態(tài)監(jiān)測(cè)與故障診斷系統(tǒng)”檢測(cè)單元、信號(hào)處理與分析的思路和關(guān)鍵技術(shù)。
教學(xué)建議:建議采用翻轉(zhuǎn)課堂教學(xué)法,學(xué)生通過(guò)查閱文獻(xiàn)自主完成設(shè)計(jì),課堂上教師給予針對(duì)性的指導(dǎo)。
6.案例聯(lián)系人
樊紅衛(wèi) hw_fan@xust.edu.cn,15829711143
案例10:采煤機(jī)搖臂狀態(tài)監(jiān)測(cè)與故障診斷系統(tǒng)
摘要:采煤機(jī)搖臂傳動(dòng)系統(tǒng)具有緊湊的結(jié)構(gòu)和大減速比,因地質(zhì)條件復(fù)雜導(dǎo)致工況多變、伴有沖擊,其齒輪、軸承等關(guān)鍵部件容易發(fā)生裂紋或斷裂等嚴(yán)重故障。本案例針對(duì)采煤機(jī)傳動(dòng)系統(tǒng)的典型故障,提供相關(guān)數(shù)據(jù)和仿真模型,通過(guò)實(shí)測(cè)數(shù)據(jù)分析與動(dòng)力學(xué)仿真結(jié)果對(duì)比,證明信號(hào)分析結(jié)果的正確性。案例開(kāi)發(fā)了一套采煤機(jī)故障診斷系統(tǒng),能夠?qū)崿F(xiàn)對(duì)其運(yùn)行狀態(tài)監(jiān)測(cè)與典型故障診斷。該案例能夠用于《機(jī)械設(shè)備故障診斷技術(shù)》《機(jī)電一體化系統(tǒng)設(shè)計(jì)》等課程中“動(dòng)力學(xué)建模仿真”“傳感與信號(hào)分析”“監(jiān)測(cè)診斷系統(tǒng)”案例教學(xué)。
關(guān)鍵詞:煤礦;采煤機(jī);傳動(dòng)系統(tǒng);狀態(tài)監(jiān)測(cè);故障診斷
一、科研項(xiàng)目基本信息介紹
毛清華,樊紅衛(wèi),劉志明,萬(wàn)翔,薛旭升等. 陜西省重點(diǎn)研發(fā)計(jì)劃一般項(xiàng)目,2019GY-093,采煤機(jī)機(jī)械傳動(dòng)裝置遠(yuǎn)程智能診斷系統(tǒng)研發(fā),2019-01至2020-12,10萬(wàn)元
二、科研促進(jìn)教學(xué)案例
1.案例主要內(nèi)容
開(kāi)發(fā)的“采煤機(jī)狀態(tài)監(jiān)測(cè)與故障診斷系統(tǒng)”如圖1所示。系統(tǒng)功能包括數(shù)據(jù)采集、信號(hào)處理功能、故障診斷功能、數(shù)據(jù)管理功能及輔助功能。搭建試驗(yàn)平臺(tái),模擬了齒輪裂紋故障,利用開(kāi)發(fā)的系統(tǒng)實(shí)時(shí)監(jiān)測(cè)并診斷輪系運(yùn)行狀態(tài),結(jié)果表明,太陽(yáng)輪出現(xiàn)齒根裂紋時(shí)振動(dòng)信號(hào)幅值頻譜圖中嚙合頻率、太陽(yáng)輪故障特征功率及其組合頻率處峰值突出,證明所構(gòu)建的輪齒裂紋動(dòng)力學(xué)模型是可行有效的,時(shí)頻信號(hào)分析方法是可靠實(shí)用的,狀態(tài)監(jiān)測(cè)及故障診斷軟件運(yùn)行穩(wěn)定可靠。
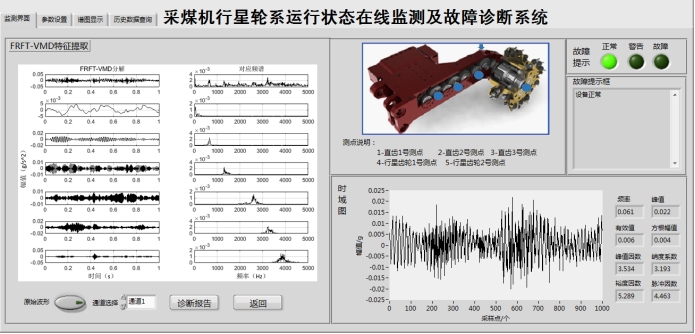
圖1 采煤機(jī)狀態(tài)監(jiān)測(cè)與故障診斷系統(tǒng)
本案例已開(kāi)發(fā)相關(guān)軟件1套,發(fā)表論文8余篇,申請(qǐng)專利1項(xiàng),登記軟著1件,可用于《機(jī)械設(shè)備故障診斷技術(shù)》《機(jī)械工程測(cè)試技術(shù)》《礦山設(shè)備與電氣控制》《機(jī)電一體化系統(tǒng)設(shè)計(jì)》等課程案例教學(xué)。
2.案例實(shí)際應(yīng)用效果簡(jiǎn)介
(1)本案例長(zhǎng)期用于機(jī)械類各專業(yè)本科生多門專業(yè)課程的理論教學(xué),具有技術(shù)前沿性、綜合性和實(shí)用性特點(diǎn),能夠支撐學(xué)生創(chuàng)新能力和知識(shí)綜合應(yīng)用能力的培養(yǎng),啟發(fā)學(xué)生認(rèn)識(shí)并探索解決復(fù)雜機(jī)電工程問(wèn)題。
(2)本案例相關(guān)內(nèi)容已在張旭輝、樊紅衛(wèi)等主編《機(jī)電一體化系統(tǒng)設(shè)計(jì)》規(guī)劃教材中引用,主要服務(wù)于該教材“第5章 機(jī)電一體化檢測(cè)系統(tǒng)設(shè)計(jì)——5.4 設(shè)備健康監(jiān)測(cè)常用傳感器及檢測(cè)技術(shù)”等章節(jié)的講授,體現(xiàn)了教學(xué)內(nèi)容的新穎性和高階性。
3.支撐材料
(1)“采煤機(jī)搖臂狀態(tài)監(jiān)測(cè)與故障診斷系統(tǒng)”項(xiàng)目結(jié)題報(bào)告;
(2)已發(fā)表的主要參考論文
[1]樊紅衛(wèi),張旭輝,曹現(xiàn)剛,萬(wàn)翔,楊一晴. 智慧礦山背景下我國(guó)煤礦機(jī)械故障診斷研究現(xiàn)狀與展望[J]. 振動(dòng)與沖擊,2020, 39(24): 194-204.
[2]毛清華,張旭輝,馬宏偉,邢望,樊紅衛(wèi). 采煤機(jī)搖臂齒輪傳動(dòng)系統(tǒng)振源定位分析方法[J]. 振動(dòng).測(cè)試與診斷,2016, 36(3): 466-470, 601-602.
[3]毛清華,張勇強(qiáng),趙曉勇,張旭輝,樊紅衛(wèi),張飛. 變速工況下采煤機(jī)行星齒輪傳動(dòng)系統(tǒng)故障診斷[J]. 工礦自動(dòng)化,2021, 47(07): 8-13.
[4]王巖,曹現(xiàn)剛,張旭輝,樊紅衛(wèi),段雍,霍小泉. 基于知識(shí)圖譜的采煤機(jī)智能維護(hù)知識(shí)庫(kù)構(gòu)建[J]. 工礦自動(dòng)化,2021, 47(07): 29-36.
[5]張旭輝,潘格格,郭歡歡,毛清華,樊紅衛(wèi),萬(wàn)翔. 基于深度遷移學(xué)習(xí)的采煤機(jī)搖臂部滾動(dòng)軸承故障診斷方法[J]. 煤炭科學(xué)技術(shù),2022, 50(4): 256-263.
4.案例思考題
(1)機(jī)械傳動(dòng)系統(tǒng)的故障特征頻率如何計(jì)算?
(2)早期微弱機(jī)械故障的診斷有哪些常用方法?各有何優(yōu)缺點(diǎn)?
(3)除了振動(dòng)信號(hào),采煤機(jī)的故障診斷還有哪些信號(hào)可用?這些信號(hào)的信息融合如何開(kāi)展?
(4)除了故障類型的診斷外,如何基于實(shí)測(cè)數(shù)據(jù)開(kāi)展故障趨勢(shì)預(yù)測(cè)技術(shù)研究?
5.案例使用說(shuō)明
適用范圍:機(jī)械類專業(yè)本科三/四年級(jí)
配套教材:張旭輝,樊紅衛(wèi)等. 機(jī)電一體化系統(tǒng)設(shè)計(jì)[M]. 武漢:華中科技大學(xué)出版社,2020.
教學(xué)目的:掌握“采煤機(jī)搖臂狀態(tài)監(jiān)測(cè)與故障診斷系統(tǒng)”檢測(cè)單元、信號(hào)處理與分析的思路和關(guān)鍵技術(shù)。
教學(xué)建議:建議采用翻轉(zhuǎn)課堂教學(xué)法,學(xué)生通過(guò)查閱文獻(xiàn)自主完成設(shè)計(jì),課堂上教師給予針對(duì)性的指導(dǎo)。
6.案例聯(lián)系人
樊紅衛(wèi) hw_fan@xust.edu.cn,15829711143
 學(xué)校首頁(yè)
學(xué)校首頁(yè)

 西科機(jī)械e家
西科機(jī)械e家
 友情鏈接
友情鏈接